

Active Mass Damper: un’innovazione nella protezione sismica delle strutture – Parte 2
Gli Active Mass Damper (AMD) rappresentano una soluzione innovativa per la protezione sismica degli edifici, riducendo le vibrazioni senza alterarne le caratteristiche strutturali. Questa seconda parte illustra alcuni dei parametri che governano la progettazione di un sistema di AMD.
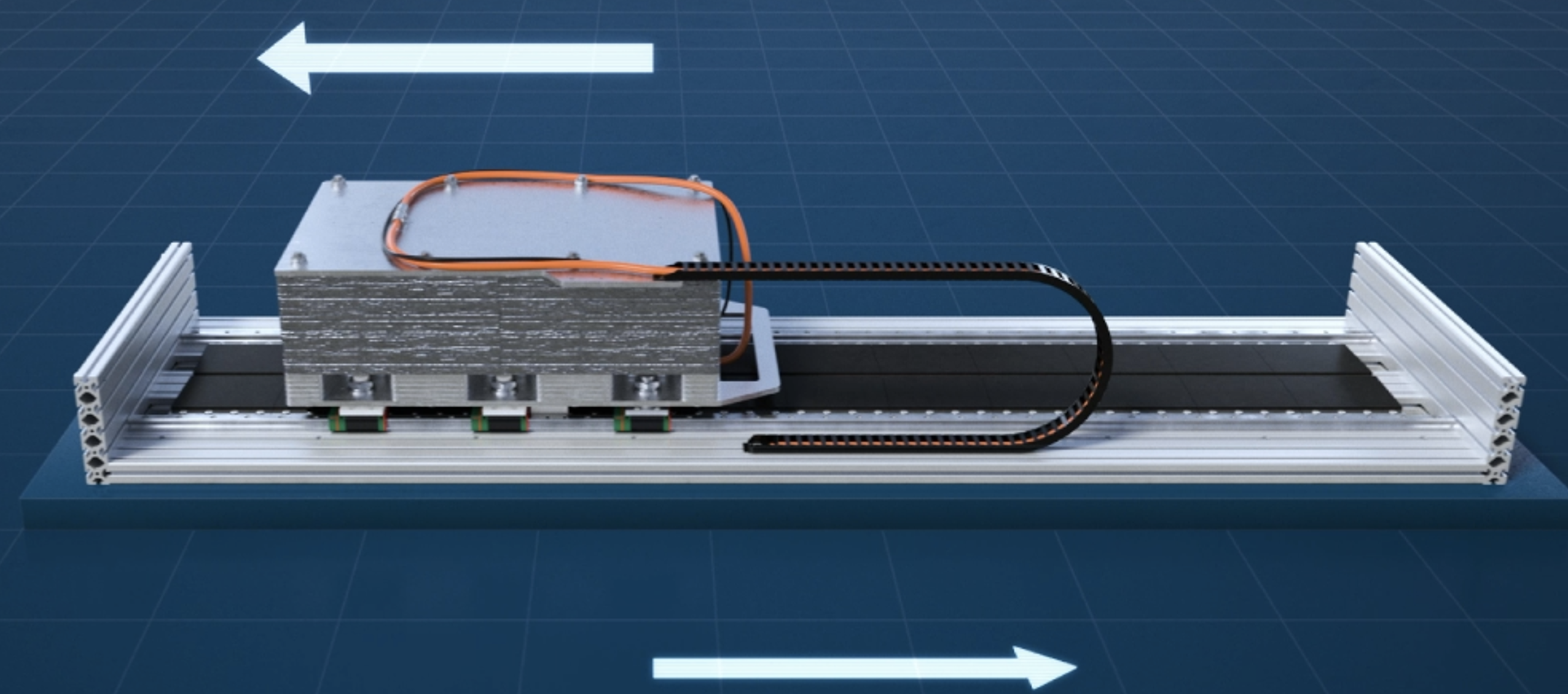
La Parte 1 di questo contributo ha presentato i sistemi AMD sviluppati da ISAAC e l’algoritmo che ne costituisce il fondamento.
I parametri fondamentali relativi ad un sistema di AMD con legge di controllo di tipo Sky-Hook sui quali è possibile intervenire e che devono essere attentamente considerati nelle fasi di progettazione sono i seguenti:
- Massa mobile
- Corsa
- Numero di assi inerziali
- Disposizione planimetrica degli assi inerziali
- Gain
In questo prosieguo verrà quantificato lo smorzamento apportato dagli AMD e verranno approfonditi i parametri di massa mobile e corsa.
Smorzamento aggiunto dagli AMD
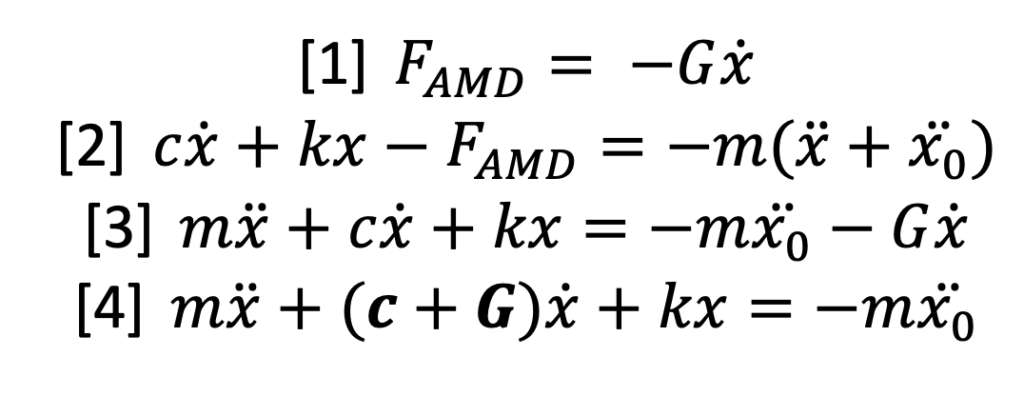
La logica di controllo implementata nei sistemi ISAAC permette di ottenere forze in grado di incrementare lo smorzamento strutturale. Infatti, scrivendo l’equazione del moto di un oscillatore semplice ad un grado di libertà soggetto ad un’eccitazione al suolo ![]() e operando degli opportuni passaggi, si riconosce che l’applicazione della forza di controllo esercitata dal sistema AMD [1] si traduce in una dissipazione supplementare di energia [4]:
e operando degli opportuni passaggi, si riconosce che l’applicazione della forza di controllo esercitata dal sistema AMD [1] si traduce in una dissipazione supplementare di energia [4]:

In analogia alla usuale definizione di smorzamento rispetto al critico, si può scrivere il contributo fornito dal sistema AMD come:
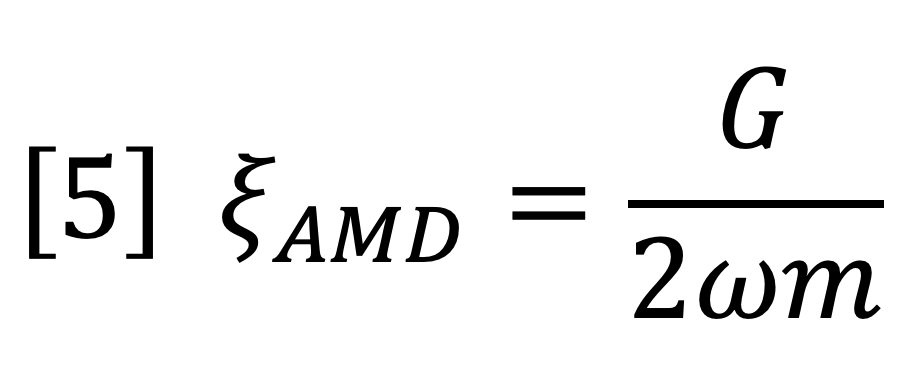
dove:
- G è il parametro Gain
- w è la pulsazione naturale dell’oscillatore
- m è la massa dell’oscillatore
Se il numero di assi inerziali è maggiore dell’unità la relazione diventa:
Con nAMD numero di assi inerziali. È evidente che all’aumentare del numero di assi inerziali, aumenta il contributo dissipativo offerto dal sistema.
Massa mobile e corsa
I parametri relativi alla massa mobile MAMD e alla corsa C del sistema Active Mass Damper (AMD) vengono trattati congiuntamente, poiché strettamente interconnessi. Per una comprensione completa del problema, è necessario considerare anche la velocità della massa mobile e la forza di controllo massima erogabile.
È opportuno chiarire che per massimizzare l’efficacia del sistema AMD nella riduzione delle oscillazioni strutturali, la massa mobile deve essere in grado di sincronizzarsi dinamicamente con il moto della struttura. In altre parole, deve adattare in tempo reale la propria risposta alla frequenza naturale della struttura stessa.
Ogni attuatore, tuttavia, presenta un limite intrinseco di accelerazione, velocità e corsa massima, determinato dal tipo di motore installato. Tali limiti, applicando la seconda legge della dinamica, si traducono direttamente in un limite di forza di controllo massima.
Per meglio chiarire questi concetti, si consideri un semplice oscillatore a un grado di libertà, soggetto a un moto armonico monodirezionale, sul quale sia installato un AMD generico in sommità. Al fine di massimizzare l’efficacia del controllo, la massa mobile dovrà oscillare alla stessa frequenza dell’oscillatore, seguendo le equazioni caratteristiche del moto armonico. Trascurando, in prima approssimazione la presenza di un angolo di fase e considerando unicamente i moduli delle grandezze coinvolte, si può procedere a quantificare le seguenti grandezze cinematiche:
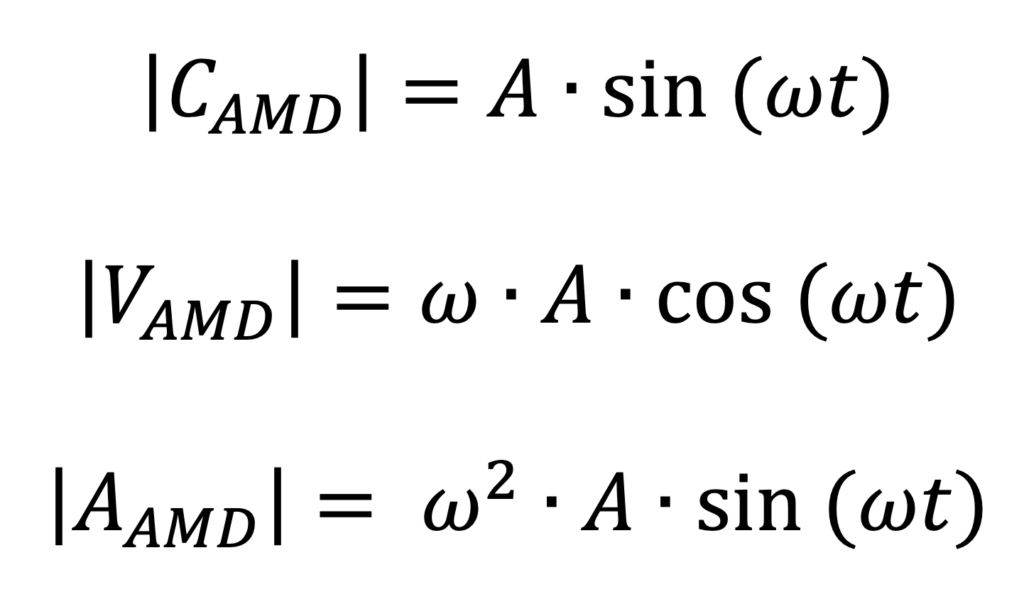
Poiché la forza di controllo è data da:

Si ricavano le seguenti relazioni fondamentali per l’AMD:
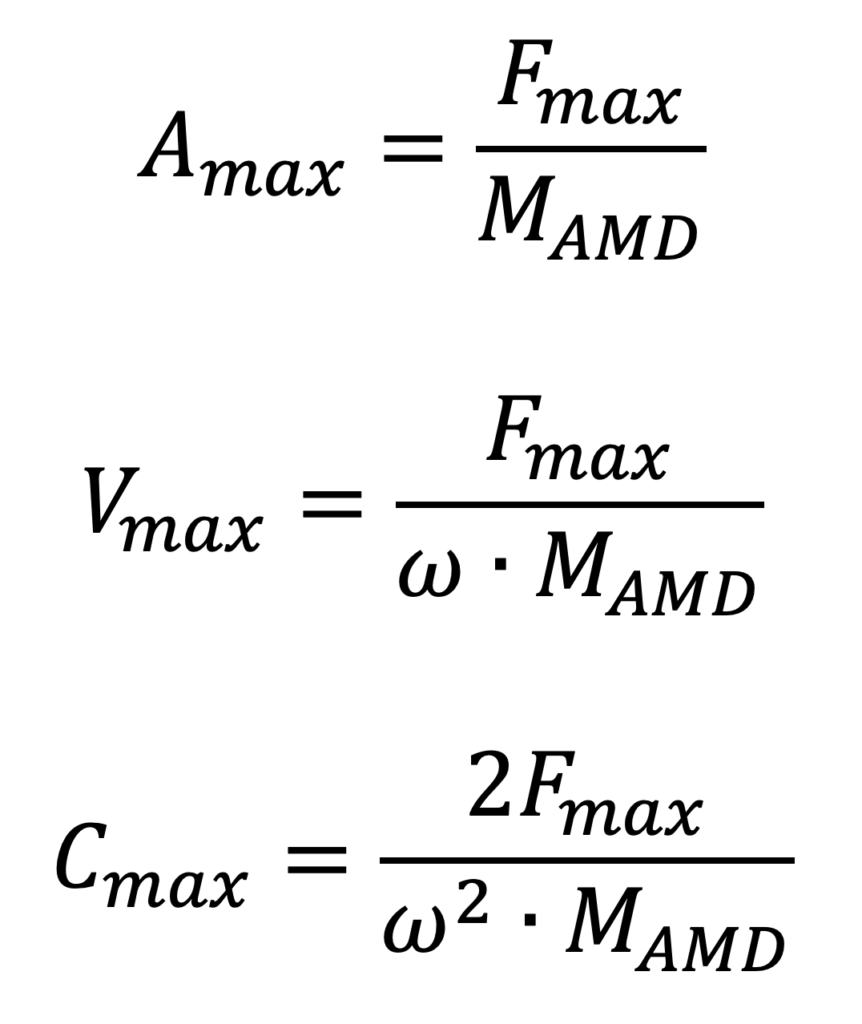
Dalle espressioni analitiche precedentemente introdotte emerge chiaramente come il comportamento di un sistema Active Mass Damper (AMD) sia fortemente dipendente dalle proprietà dinamiche della struttura sulla quale è installato. In particolare, un AMD montato su una struttura flessibile (caratterizzata da una bassa frequenza propria) richiederà velocità e corse maggiori per generare la stessa forza rispetto a un AMD installato su una struttura più rigida (frequenza propria elevata).
Per approfondire questo concetto, si consideri il seguente esempio semplificato:
- primo oscillatore con periodo proprio pari a 0,5 s;
- secondo oscillatore con periodo proprio pari a 2,0 s;
- sistema AMD ideale dotato di una massa mobile pari a 600 kg.
Supponendo che l’AMD possa generare una forza massima di circa 20 kN, si osserva che:
- per il primo oscillatore (periodo 0,5 s), l’AMD dovrebbe essere in grado di raggiungere una corsa di circa 40 cm e una velocità di picco di circa 2,6 m/s;
- per il secondo oscillatore (periodo 2,0 s), sarebbero necessari quasi 7 metri di corsa e velocità superiori ai 10 m/s.
Se si ipotizza un limite fisico del sistema, ad esempio una velocità massima raggiungibile pari a 3 m/s, risulta che:
- l’AMD installato sulla struttura più rigida (primo oscillatore) sarebbe in grado di generare la forza richiesta di 20 kN;
- l’AMD installato sulla struttura più flessibile (secondo oscillatore) sarebbe invece limitato a una forza di circa 6 kN.
In presenza di una struttura flessibile, una possibile soluzione per consentire all’AMD di sviluppare una forza maggiore consiste nell’aumento della massa mobile. Come evidenziato dalle relazioni cinematiche, all’aumentare della massa mobile diminuiscono i requisiti di velocità e corsa necessari per ottenere una determinata forza. Ad esempio, per garantire 20 kN sul secondo oscillatore, la massa mobile dovrebbe essere incrementata fino a circa 2 tonnellate.
Un ragionamento analogo può essere condotto considerando i limiti sulla corsa massima disponibile. Supponendo un vincolo di corsa pari a 0,5 m:
- per l’oscillatore più rigido, si potrebbe ottenere una forza di controllo massima superiore a 23 kN;
- per l’oscillatore più flessibile, la forza di controllo massima sarebbe limitata a circa 1,5 kN.
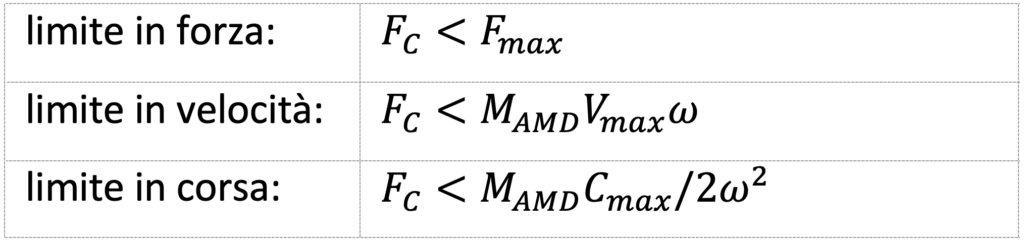
Quindi, riassumendo i vari limiti si ha:
Nel prossimo articolo ci concentreremo maggiormente sui restanti parametri della progettazione di un sistema di AMD, ovvero: numero di assi inerziali, disposizione planimetrica degli assi inerziali e Gain.
Bibliografia
BANDINI L., Metodi avanzati di protezione sismica: dissipazione supplementare di energia ad opera di controventi dissipativi, Rivista Lo Strutturista, numero 1, gennaio 2020
Circolare 21 gennaio 2019 n. 7, Istruzioni per l’applicazione dell’”Aggiornamento delle Norme Tecniche per le costruzioni” di cui al Decreto Ministeriale 17 gennaio 2018, G. U. 11 febbraio 2019, n. 35
D.M. Infrastrutture e Trasporti 17 gennaio 2018, Aggiornamento Norme Tecniche per le costruzioni, G. U. 20 febbraio 2018
MENARDO F., CII S., Protezione sismica di strutture mediante sistemi di controllo attivi: Active Mass Damper, Rivista Lo Strutturista, numero 11, luglio 2022
NUNZIATA V., Strength Ductility Design: progettazione per resistenza e duttilità, Rivista Lo Strutturista, numero 0, ottobre 2019










La rete degli strutturisti
Entra a far parte del più grandi network di strutturisti italiani.


La rivista “Lo Strutturista”
Trimestrale cartaceo disponibile in abbinamento per la formazione del progettista
