

La fusione tra CAD e FEM: l’analisi Isogeometrica
Un nuovo paradigma per l’analisi strutturale: l’isogeometria unisce modellazione e simulazione numerica. In questa prima parte, i fondamenti e il ruolo chiave delle B-spline.
L'analisi isogeometrica (IgA) è un approccio relativamente recente alla simulazione numerica, che nasce dall'esigenza di integrare meglio il mondo della modellazione geometrica con quello dell'analisi strutturale. Nata come una naturale evoluzione del metodo degli elementi finiti (FEM), l'analisi isogeometrica punta a superare alcune delle limitazioni del FEM tradizionale, in particolare per quanto riguarda l'interazione con i modelli geometrici definiti tramite software CAD.
Nel FEM tradizionale, la geometria della struttura viene discretizzata in una mesh di elementi finiti, che spesso non coincide perfettamente con la geometria originaria definita nel CAD. Ciò porta a una perdita di precisione e ad un aumento del lavoro necessario per trasferire la geometria dal CAD all'analisi numerica. L'analisi isogeometrica affronta questo problema utilizzando le stesse funzioni di base impiegate nel CAD (come le B-spline e NURBS) per rappresentare sia la geometria che i campi di soluzione (come gli spostamenti o le deformazioni), garantendo una corrispondenza diretta tra modello geometrico e modello numerico.
L'idea di unire il CAD e il FEM non è nuova, ma è diventata una realtà concreta solo a metà degli anni 2000 grazie agli studi di Thomas J.R. Hughes e colleghi, che hanno formalizzato il concetto di analisi isogeometrica. La loro proposta di utilizzare B-spline e NURBS per rappresentare la geometria all'interno del FEM ha rivoluzionato il modo in cui la geometria e le soluzioni numeriche vengono trattate simultaneamente. L'obiettivo iniziale era quello di migliorare l'efficienza e la precisione del processo di modellazione numerica, riducendo la discrepanza tra il modello CAD e quello numerico.
Da allora, l'analisi isogeometrica ha visto numerosi sviluppi teorici e applicativi, con estensioni a vari tipi di problemi ingegneristici, tra cui quelli della meccanica strutturale e della meccanica dei fluidi.
In questo articolo descriverò i concetti fondamentali dell'analisi isogeometrica, con particolare riferimento alla meccanica delle strutture, mettendo in evidenza le principali differenze rispetto al FEM. L'articolo sarà suddiviso in più parti data la complessità del tema. In questa prima sezione, dopo aver introdotto i concetti generali, che sono comuni anche al FEM, mi concentrerò principalmente sulle funzioni di base utilizzate per descrivere sia la geometria che il campo di spostamenti. In particolare, approfondirò una tecnica di modellazione geometrica, le B-spline, che è ampiamente utilizzata nei software CAD e che, pur essendo relativamente semplice da descrivere, conserva molte delle proprietà che rendono l'analisi isogeometrica un valido candidato per sostituire il FEM nelle applicazioni future.
Le idee di base del FEM e dell’IgA
Prima di spiegare il funzionamento dell’analisi isogeometrica e le sue differenze rispetto al metodo degli elementi finiti, è utile ricordare ai lettori meno esperti che entrambi questi metodi vengono utilizzati per risolvere un’ampia gamma di problemi, non limitati all’ingegneria strutturale. Questi metodi trovano infatti applicazione generale nella risoluzione di problemi al contorno.
Nel nostro caso, ci concentreremo sull’applicazione alla meccanica dei solidi e delle strutture. Partendo da questo ambito, descriveremo il problema tipico che questi metodi affrontano. In generale, tali problemi sono definiti da una o più equazioni differenziali e dalle relative condizioni al contorno, che rappresentano una serie di vincoli matematici sulle funzioni di spostamento dei punti di una struttura. Per maggiore chiarezza, consideriamo un esempio pratico: il caso dei solidi elastici, che è il più semplice da analizzare.
Un problema classico di meccanica dei solidi elastici può essere descritto da tre tipi di equazioni:
- Relazione tra spostamenti e deformazioni: e = Du
- Legame costitutivo (che descrive il comportamento del materiale): s = Ee
- Equilibrio del tensore delle tensioni: DTs + b = o
Qui i simboli hanno i seguenti significati:
e = (εx,εy,εz,γyz,γzx,γxy) è il tensore delle deformazioni infinitesime (in notazione di Voigt).
s = (σx,σy,σz,τyz,τzx,τxy) è il tensore delle tensioni (anch’esso in notazione di Voigt).
u= (ux,uy,uz) rappresenta gli spostamenti.
b= (bx,by,bz) sono le forze volumiche applicate.
E è la matrice elastica, che descrive la rigidezza del materiale.
D è un operatore differenziale (una matrice contenente derivate parziali) che viene usata per calcolare le componenti di deformazione infinitesima a partire dagli spostamenti. DT è la trasposta di D, usata per descrivere l’equilibrio delle tensioni.
Queste equazioni devono essere rispettate in tutti i punti del solido S. Esse possono essere sintetizzate in una singola equazione differenziale che rappresenta il problema della meccanica dei solidi elastici:
DTCDu + b = o
A questa si aggiungono le condizioni al contorno, che devono essere rispettate sul bordo ∂S di S, che a sua volta è suddiviso in una parte vincolata ∂Sv e una parte libera da vincoli ∂Sl. Le condizioni al contorno specificano:
Gli spostamenti imposti sui vincoli: u= ū su ∂Sv
I carichi agenti sul contorno libero: EDu=tn su ∂Sl
Questo approccio permette di definire con precisione il problema elastico e costituisce la base per l’utilizzo sia dell’analisi isogeometrica sia del metodo degli elementi finiti.
Per poter applicare questi metodi, è necessario riformulare il problema in una forma integrale che può essere ottenuta a partire da quella differenziale descritta in precedenza.
Questa equazione è accompagnata solo dalle condizioni al contorno relative al bordo vincolato, poiché quelle sul contorno libero sono già incluse nell’equazione stessa.
Chi ha familiarità con la meccanica dei solidi riconoscerà in questa espressione l’equazione dei lavori virtuali:
Il termine a sinistra rappresenta il lavoro virtuale interno, cioè il lavoro compiuto dalle tensioni sul campo di deformazioni associate agli spostamenti virtuali v.
I termini a destra indicano il lavoro virtuale esterno, prodotto dai carichi sul contorno libero (tn) e dalle forze di volume (b) sullo stesso campo di spostamenti virtuali.
Per risolvere questa equazione integrale utilizzando il metodo degli elementi finiti o l’analisi isogeometrica, si applicano due principi fondamentali:
1 - Partizione del dominio: il dominio S e il suo bordo ∂S vengono suddivisi in sotto-domini più semplici (elementi o patch).
2 - Interpolazione delle funzioni di spostamento: le funzioni u e v sono rappresentate in forma approssimata utilizzando funzioni di base definite su questa suddivisione.
Grazie a queste strategie, l’equazione integrale viene trasformata in un sistema di equazioni algebriche. Le incognite del sistema sono valori discreti che descrivono i campi di spostamento u e v, rendendo il problema risolvibile numericamente.
Le funzioni di base dell’IgA
Al fine di integrare in modo diretto la rappresentazione geometrica con l’analisi numerica, l’analisi isogeometrica utilizza le stesse funzioni di base impiegate nei software CAD. Questo approccio elimina la necessità di convertire il modello geometrico in una mesh approssimativa, migliorando la precisione e riducendo gli errori di discretizzazione.
Le funzioni di base principali utilizzate nell’IgA sono:
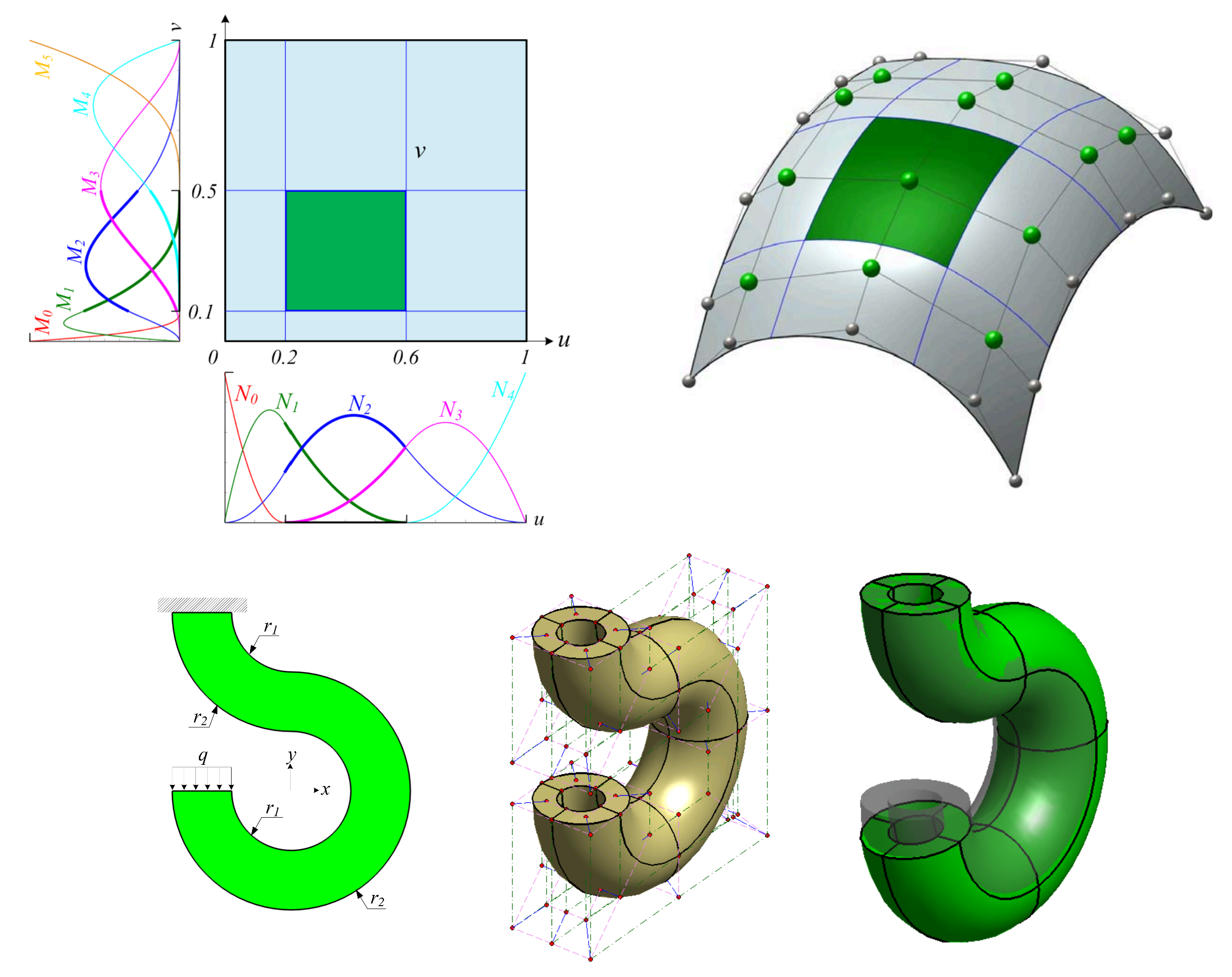
B-spline (Basis spline): Le B-spline sono funzioni polinomiali a tratti definite su un dominio suddiviso in intervalli delimitati dai cosiddetti nodi. Sono caratterizzate dal grado polinomiale delle funzioni, dal vettore di nodi, contenente una sequenza ordinata di valori che determina la suddivisione del dominio e che possono eventualmente essere ripetuti. Ogni funzione di base è diversa da zero solo in un numero limitato di intervalli, il che rende il sistema numericamente efficiente. Le B-spline sono generalmente utilizzate per approssimare curve e superfici con continuità Cp-1, dove p è il grado delle funzioni.
NURBS (Non-Uniform Rational B-Splines): Le NURBS estendono le B-spline permettendo la rappresentazione di geometrie più complesse, come cerchi esatti o superfici coniche. Esse sono definite utilizzando le stesse funzioni di base delle B-spline, e da una serie di pesi associati a ciascun punto di controllo. Questi ultimi influenzano il contributo di ciascun punto alla curva o alla superficie. Grazie all’utilizzo dei cosiddetti pesi, le NURBS possono rappresentare esattamente sia geometrie polinomiali che non polinomiali.
Oltre a queste esistono altre famiglie di funzioni di base, come ad esempio le T-spline, cioè una generalizzazione delle NURBS che permette nodi non uniformemente distribuiti. Esse sono particolarmente utili per rappresentare geometrie complesse, eliminando la necessità di patch sovrapposti nelle aree di unione, come accade con le NURBS. Per questo esse offrono maggiore flessibilità e miglior gestione della continuità geometrica. Un altro esempio è rappresentato dalle Spline gerarchiche e adattive che permettono una rappresentazione multi-scala, utile per adattare la discretizzazione in base alle necessità di precisione, o le spline PHT (Polynomial Hierarchical T-splines) che combinano la flessibilità delle T-spline con un'implementazione più semplice in contesti adattivi.
Quale che siano le funzioni di base della IgA, i vantaggi principali nell’utilizzo di questa tecnologia risiede in alcune caratteristiche principali che queste funzioni trasferisco all’IgA e la rendono un possibile candidato per sostituire il FEM nelle applicazioni del prossimo futuro:
Rappresentazione geometrica accurata: Grazie a B-spline e NURBS, è possibile usare direttamente la rappresentazione CAD, eliminando errori di approssimazione tra geometria e modello analitico.
Continuità elevata: Le funzioni base possono garantire continuità Cp-1, dove p è il grado polinomiale. Ciò significa che le funzioni rappresentate e le loro derivate, fino al grado p, sono continue. Più avanti considereremo anche il caso di nodi ripetuti. In tal caso è garantita una continuità Cp-k, dove k è il numero di ripetizioni del nodo, in corrispondenza del nodo ripetuto.
Supporto locale: Per efficienza computazionale, ogni funzione di base influenza solo una porzione limitata del dominio. Quest’ultima caratteristica è comune al FEM anche se nel FEM risulta più evidente.
Per leggere l’articolo completo acquista il numero 21 della rivista Lo Strutturista.
Per essere sempre aggiornato e leggere contenuti inediti abbonati alla rivista Lo Strutturista – La prima rivista per gli strutturisti italiani.










La rete degli strutturisti
Entra a far parte del più grandi network di strutturisti italiani.


La rivista “Lo Strutturista”
Trimestrale cartaceo disponibile in abbinamento per la formazione del progettista
